| Digital controller for multi-axis piezo nanopositioning systems. Fieldbus integration via EtherCAT interface. Additional functions with .3xDAF: Analog interfaces |
| |
| DSP 32/64-bit, floating point, 375 MHz |
Sampling rate, servo control | |
| |
| |
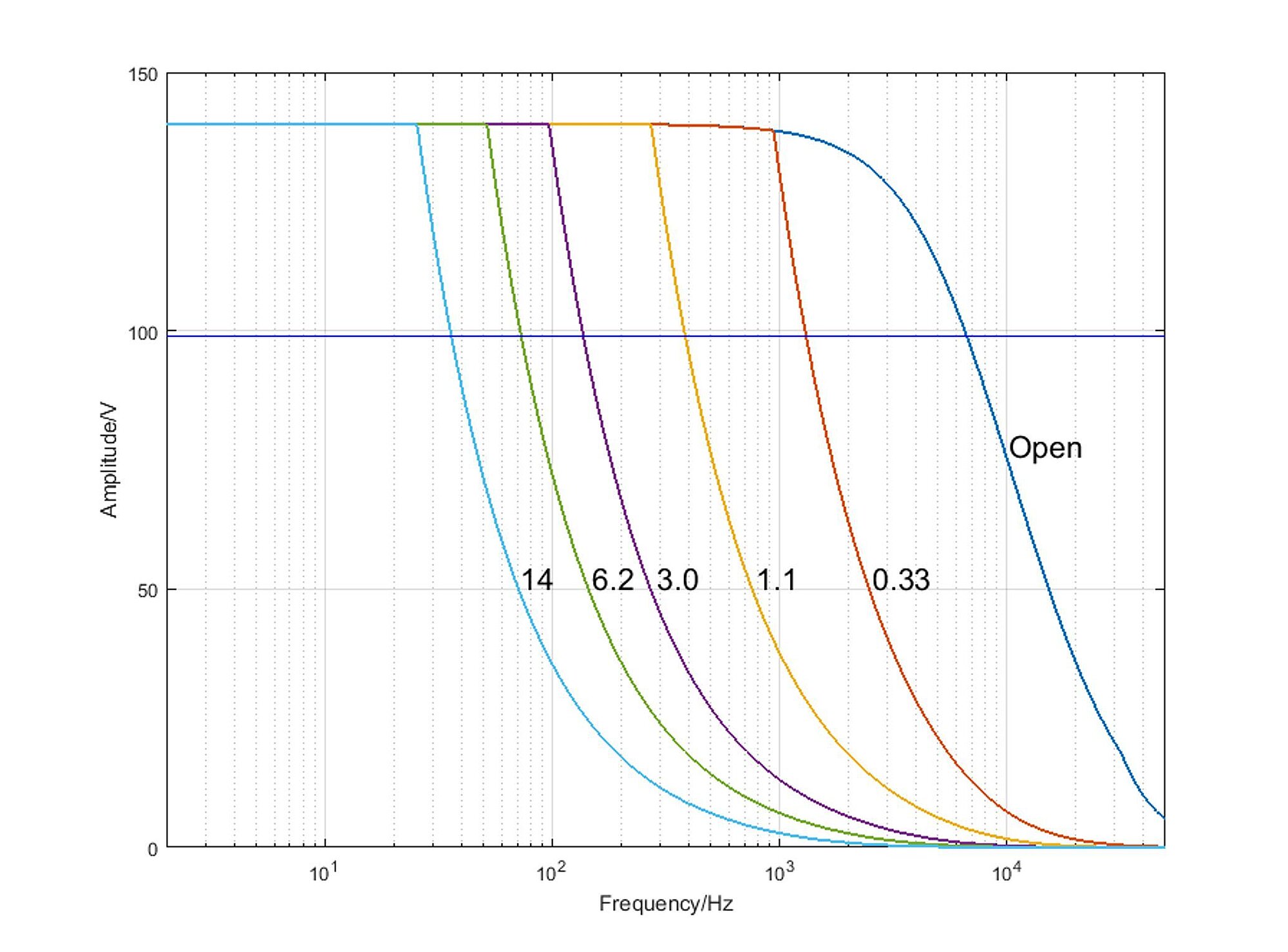
| P-I, two notch filters Optional: Advanced piezo control |
| E-727.xCxxx: Capacitive E-727.xSxxx: Strain gauge sensors E-727.xRxxx: Piezoresistive |
| E-727.xCxxx: 3 E-727.xSxxx, E-727.xRxxx: 4 |
| |
Sensor resolution (at 1 kHz oversampling) | |
| |
| |
| |
| |
Average output power / channel | |
| |
Average output current / channel | |
| |
| |
| |
| |
| |
| Connector for SPI master for fast serial transmission of target and current position |
| EtherCAT (CoE = CANopen over EtherCAT) |
| |
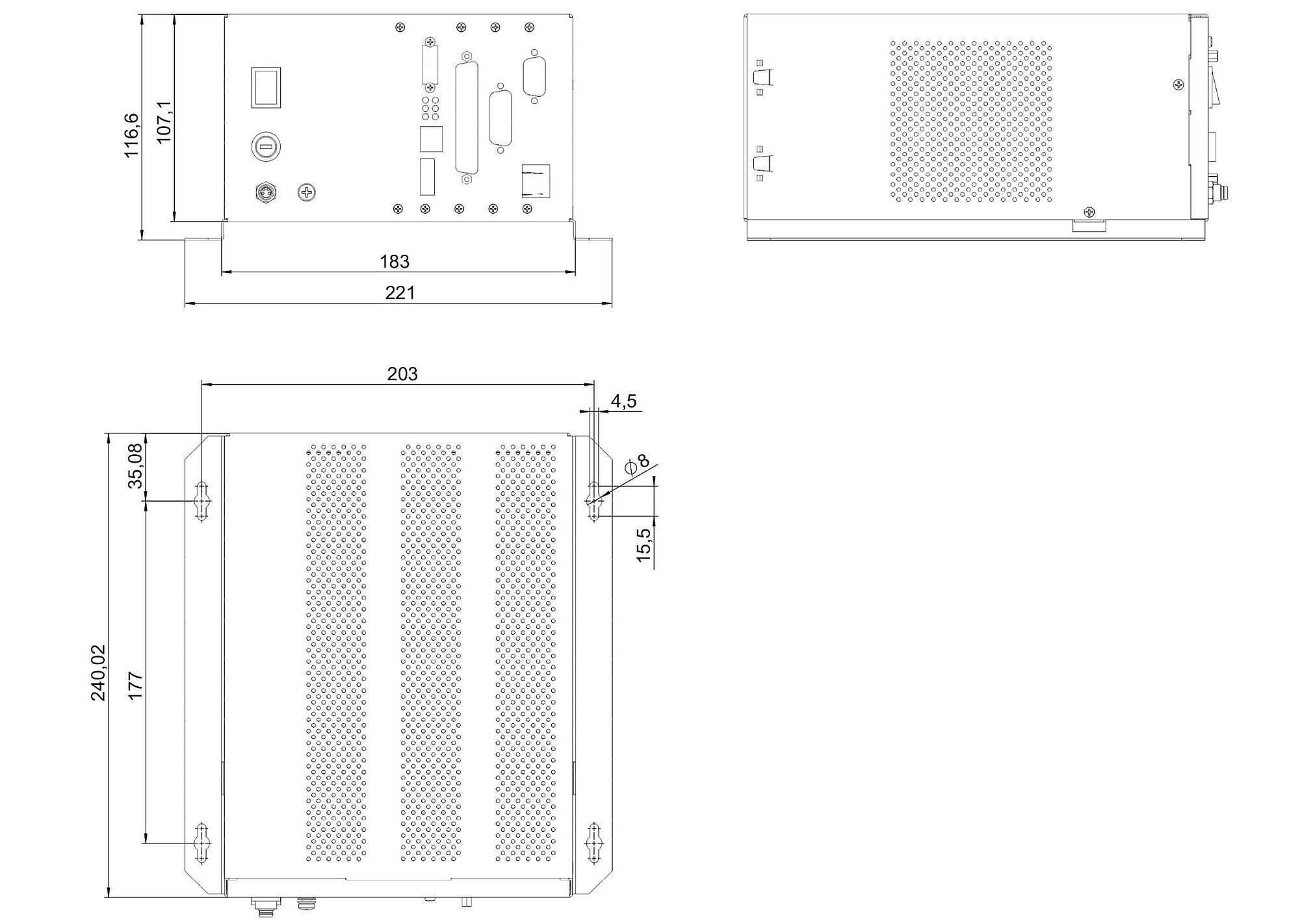
Piezo / sensor connection | E-727.xCxxx: Sub-D 25W3 (f) E-727.xSxxx, E-727.xRxxx: Sub-D 37 (f) |
| E-727.3xDAF only: Sub-D 15 (f) 4 inputs ±5 V or ±10 V 18-bit A/D converter |
| E-727.3xDAF only: Sub-D 15 (f) ±10 V 20-bit D/A converter |
| E-727.3xDAF only: Sub-D 15 (f) Sensor channels 1 to 3 |
| MDR14; 4 inputs, 4 outputs |
Separate protective earth connection | |
| |
| Command set: PI General Command Set (GCS) User software: PIMikroMove Software drivers: NI LabVIEW and MATLAB driver, shared libraries for Windows and Linux, extensive example code |
Communication via fieldbus (EtherCAT) | Drive profile CiA402 (IEC 61800-7-201) Operating modes: Cyclic Synchronous Position (CSP), Profile Position (PP), Homing Min. cycle time: 1 ms |
| Autozero, ID chip detection Addressable with GCS commands only: Wave generator, data recorder, macros |
| LEDs for Power, Servo, Error, Overflow, EtherCAT communication |
| 4th-order polynomials, DDL (Dynamic Digital Linearization, optional) |
| |
Operating temperature range | |
| Max. 72 °C, deactivation of the voltage output |
| |
| |
| |
Max. power consumption without load | |
| 24 V DC (external power adapter in the scope of delivery) |